





MAR 2023
Nicolas Escoubet soutiendra sa thèse Jeudi 09 Mars 2023 à 14h00 dans l'amphithéâtre Georges Charpak (Tour 22, RdC, Campus Jussieu).
Il présentera son travail sur le comportement du micronageur mécanosensible, la paramécie, dans des environnements à obstacles, devant le jury constitué de:
- Alexis Prevost, directeur de thèse,
- Lea-Laetitia Pontani, co-encadrante,
- Romain Brette, co-directeur de thèse,
- Xavier Noblin, rapporteur,
- Jean-Paul Rieu, rapporteur,
- Salima Rafai, examinatrice
- Hélène de Maleprade, examinatrice,
- Eric Clement, examinateur.
Résumé:
La paramécie est un micro-organisme unicellulaire eucaryote cilié d’une centaine de micromètres de long qui vit à l’état naturel dans des flaques ou des étangs et qui se déplace en battant les milliers de cils qui recouvrent sa surface. Malgré sa relative simplicité, elle peut répondre à différents types de stimuli (chimiques, de température, etc.) grâce à un mécanisme de réorientation appelé la "réaction d’évitement" (AR). Cette réaction d’évitement se manifeste aussi lors d’une stimulation mécanique de sa partie antérieure et résulte de processus bioélectriques et biochimiques internes. C’est cette faculté de mécanosensibilité qui nous a intéressés dans cette thèse. Pour cela, nous avons imagé des paramécies nageant librement dans des environnements pseudo-2D avec ou sans obstacles dans le but de caractériser leurs propriétés mécanosensibles et de comprendre comment la mécanosensibilité affecte leur nage.
Au cours de cette thèse, nous nous sommes d’abord intéressés au comportement de paramécies évoluant dans un milieu sans obstacle. Nous avons caractérisé la dynamique locale d’une AR, constituée d’une nage arrière suivie d’une réorientation, ainsi que les statistiques des AR à plus large échelle et enfin, comment l’exploration spatiale en l’absence d’obstacle est affectée par les AR. Nous avons notamment montré que ces AR spontanées conduisent à une nage de type marche aléatoire dont la longueur des pas est distribuée exponentiellement.
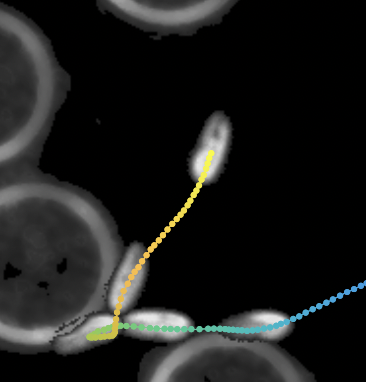
Dans une deuxième partie, nous avons étudié la nage des paramécies dans des environnements à obstacles cylindriques. Nous avons observé que lors d’une collision avec un obstacle, les paramécies étaient soit déviées passivement, soit déclenchaient une AR. Cette AR induite par la collision, signature de la mécanosensibilité, est soit déclenchée instantanément, soit retardée. Nous avons ensuite quantifié la probabilité de déclencher de telles AR en fonction de la vitesse de nage et de la taille des obstacles. Enfin, nous avons mis en évidence des effets de mémoire liés à l’historique des collisions antérieures.
Dans une troisième partie, nous nous sommes appuyés sur des simulations numériques de particules browniennes actives pour étudier leur comportement à temps long et à longue distance. Nous avons caractérisé l’efficacité de leur exploration spatiale par diffusion lorsque différents paramètres étaient changés, comme le type d’AR déclenchée (sans AR au contact, sans aucune AR, avec toutes les AR) ou la probabilité de déclencher une AR au contact. Ces simulations suggèrent que dans un réseau périodique, la probabilité d’AR au contact mesurée expérimentalement coïncide avec un optimum de diffusion.